|
Juntong Peng | 彭钧桐 Hi! I am a first-year Ph.D. student in Purdue ECE, co-advised by Prof. Yaobin Chen and Prof. Ziran Wang. I received my bachelor degree in information enginnering from Shanghai Jiao Tong University, advised by Prof. Siheng Chen. I have also spent a wonderful summer at the Department of Computer Science, Purdue University as a research intern, advised by Prof. Aniket Bera. |

|
Research
My research focuses on autonomous driving and computer vision,
specifically on end-to-end driving and human-AI teaming.
|
Publications |
|
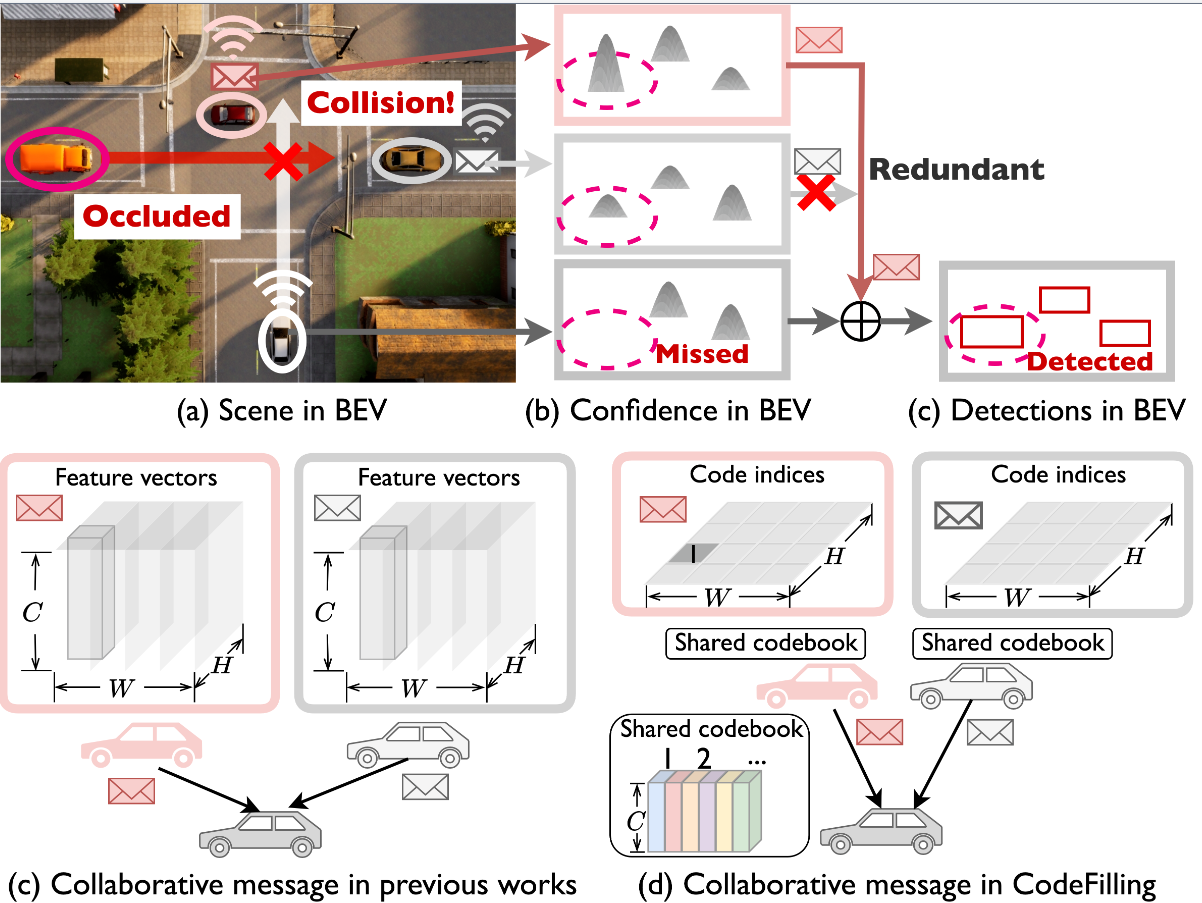
Communication-Efficient Collaborative Perception via Information Filling with Codebook
Yue Hu, Juntong Peng, Sifei Liu, Junhao Ge, Si Liu, Siheng Chen CVPR, 2024
|
|
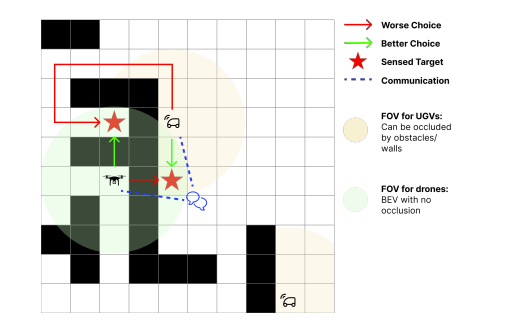
Graph-based Decentralized Task Allocation for Multi-Robot Target Localization
Juntong Peng, Hrishikesh Viswanath, Aniket Bera RAL, 2024 arXiv
|
|
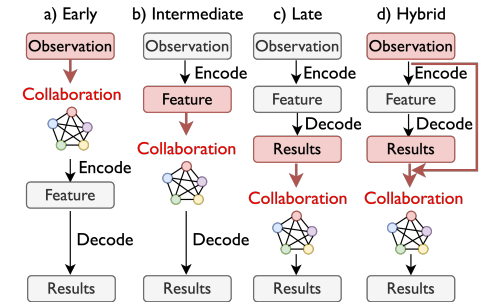
Communication-Efficient Multi-Agent 3D Detection via Hybrid Collaboration
Yue Hu, Juntong Peng, Yunqiao Yang, Xiaoqi Qin, Zhiyong Feng, Wenjun Zhang, Siheng Chen 2024, Under review
|
|
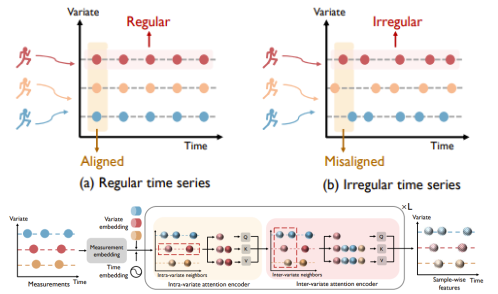
Compatible transformer for irregularly sampled multivariate time series
Yuxi Wei, Juntong Peng, Tong He, Chenxin Xu, Jian Zhang, Shirui Pan, Siheng Chen ICDM, 2023 project page / arXiv
|
Service & TeachingReviewer: IEEE Robotics and Automation Letters 2023 Reviewer: IEEE Internet of Things Journal 2023 TA: CS1108 - Introduction to Data Science, fall 2023 Fall, 2023 |
InternshipStrategic Intern @ Corporate Research, Robert Bosch GmbHJan. 2024 - Jun. 2024 |
|
This homepage is designed based on Jon Barron's website.
|